●
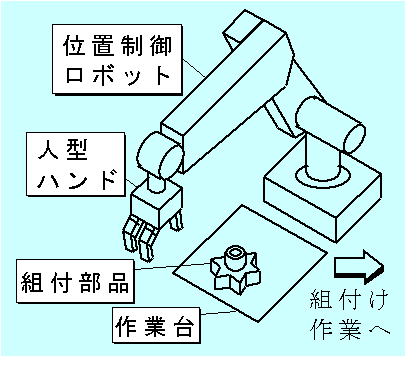
人間型ロボットハンドの研究
●
人間型ロボットハンドによる手探り動作の研究
↓
●
3本指9自由度力制御型ロボットハンド開発
(最大指力:2kg,最小指力分解能:20g)
●
工業部品の把持作業実現
人間のように豆腐や卵などを把握できる器用なロボットハンド